
This blog is on the first and final(ly!) recovery of the stand-alone instrumentation that was underwater for 3.5 years. The recovery cruise is scheduled for research vessel Pelagia with aid of Irish Marine Institute deep-water Remotely Operated Vehicle (ROV) Holland-1 to occur between 25 February and 06 March 2024.
Main goal is the recovery of the 3000 T-sensors, and 3 current meters. The ROV will, first, cut the 45 vertical lines holding the sensors, and, second, cut the grid of cables between the large ring that fixes the vertical lines.
Phase 1 consists of ROV cutting the 5-mm diameter steel vertical lines near the seafloor. Once cut, the top-floatation will bring each line holding 63 T-sensors to the surface. One (or two) inflatable working-boats will assist to bring each buoy with mooring line to the Pelagia for recovery. This day-time operation will take 4-5 days, and strongly depends on the weather conditions.
Phase 2 involves ROV cutting the 12-mm diameter cable network at the seafloor to be able to bring it to the surface. A specially designed recovery-mooring line will be deployed from the Pelagia and will be connected by ROV to the cut network. This is expected to be a 24-h operation.
Phase 3, after demobilization of the ROV, will consist of recovery of the mooring line with the entire attached seafloor grid material. This recovery may take one day.
25 February 2024
by Hans van Haren
During the past three days in the harbour of La Seyne-sur-mer (France), R/V Pelagia has been loading equipment for recovery of the lines of the large-ring mooring. Some of the containers on board had to be taken off and stored temporarily on the quay-side. A large harbour-crane was used to lift the heavy materials, including the winch for the underwater Remotely Operated Vehicle (ROV) of the Irish Marine Institute.
After two days of installation and testing we are ready for departure. Sunday night 25 February we will leave port, and sail to our operational area outside the harbour of Toulon. Weather conditions are reasonable, somewhat windy, moderate waves, rain showers and rather cool temperatures. Tomorrow morning we will start our operations. Very excited to see how the mooring lines are after nearly 3.5 years underwater.

5 March 2024
by Hans van Haren
Monday morning 26 February R/V Pelagia was on station and we started by deploying the ROV into the sea. It took about one-and-a-half hours to be lowered by winch to the seafloor. Once just above the seafloor it sailed to the large mooring, using acoustics positioning and finally the ring became visual by the ROV’s multiple camera’s.
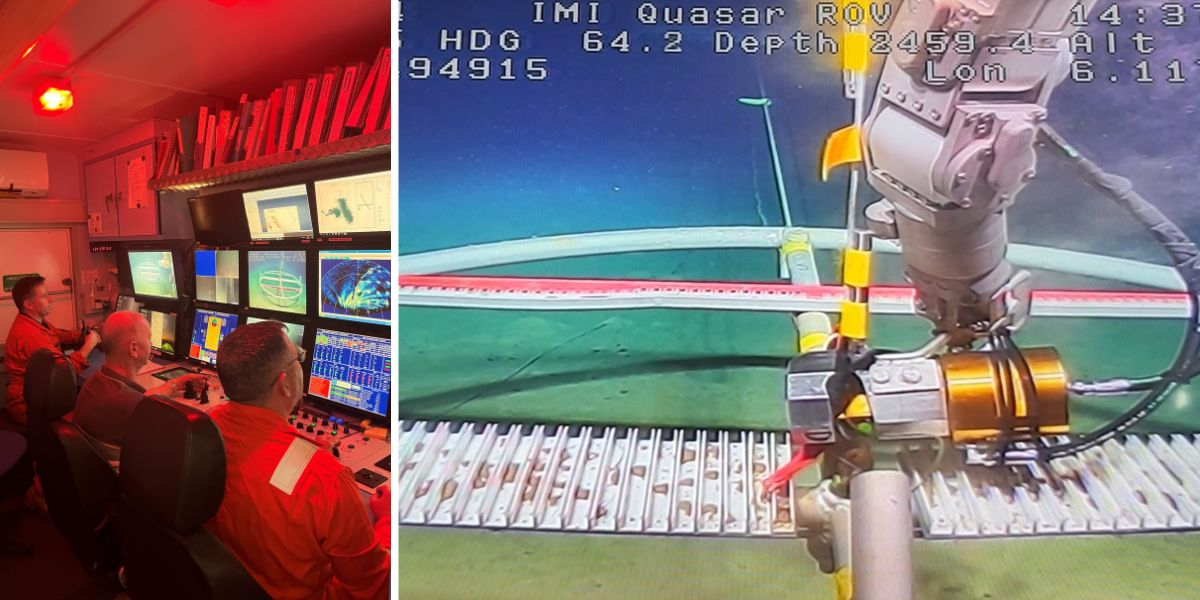
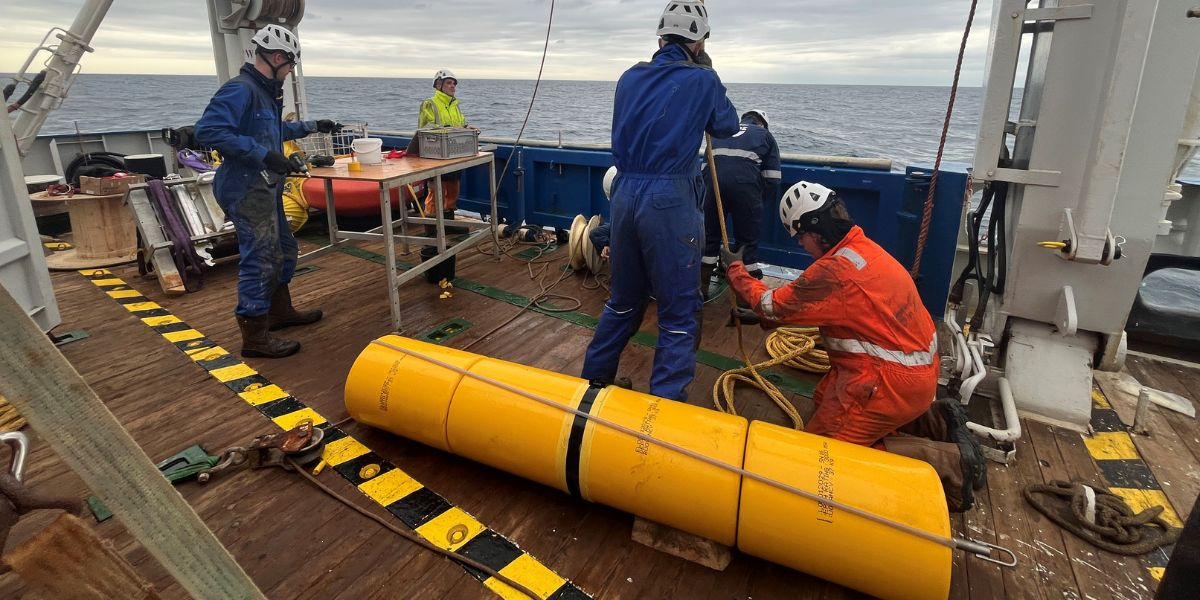
One by one, about every 15 minutes, a vertical line was cut by the ROV. The line’s top-buoy moved upward at a speed of 2 meters per second and was spotted from the ship’s bridge 20 minutes after the line was cut by the ROV. We used a small working boat to pick up the buoy and brought it to the stern of the Pelagia where it was attached to a line coming from a winch on the aft-deck. Crew brought top-buoy, mooring line and temperature sensors on board.
After 2.5 days of reasonable weather, less than 2 m waves and about Beaufort 4 winds, all 45 lines were recovered. All nearly 3000 temperature sensors were opened and their memory cards read. After some 5 days of card-reading about 95% of the sensors delivered good data. A very good result.


 Hans van Haren
Hans van Haren